KY-037 Mikrofon Soundsensor (hohe Empfindlichkeit)
Dieser Sensor gibt ein Signal aus, falls das vordere Mikrofon des Sensors ein Geräusch wahr nimmt.
- Arduino
- Raspberry Pi
- Raspberry Pi Pico
- Micro:Bit
Der Mikrofon-Soundsensor mit hoher Empfindlichkeit gibt ein Signal aus, wenn das vordere Mikrofon ein Geräusch wahrnimmt. Die Empfindlichkeit des Sensors kann mit einem Regler angepasst werden, sodass er auf unterschiedlich laute Geräusche reagieren kann. Dieser Sensor eignet sich ideal für Projekte, bei denen Geräusche erkannt und darauf reagiert werden sollen, wie z.B. in Sprachsteuerungen, Überwachungssystemen oder interaktiven Installationen. Durch die einstellbare Empfindlichkeit kann der Sensor an verschiedene Umgebungsbedingungen und spezifische Anforderungen angepasst werden.
Benutzungshinweis
Dieser Sensor ist ideal für die Schwellenwertmessung geeignet. Das bedeutet, dass der Sensor ein digitales High-Signal abgibt, sobald ein am Drehpotentiometer vom Anwender eingestellter Schwellenwert überschritten wird. Hierbei ist zu beachten, dass das digitale Signal aus dem Vergleich des Wertes, welche am Drehpotentiometer eingestellt ist und dem gemessenen Wert am Sensor ist, welche dann vom auf dem Board verbauten LM393 Komparator verglichen werden. Dabei ist der eingestellte Wert des Drehpotentiometers der Schwellenwert, welcher dazu dient ein logisches High-Signal zu definieren.
Digitaler Ausgang: Liegt der Tonpegel überhalb des eingestellten Schwellwertes, so wird hier ein Signal ausgegeben
Analoger Ausgang: Direkter Messwert der Sensoreinheit
LED1: Zeigt an, dass der Sensor mit Spannung versorgt ist
LED2: Zeigt an, dass der Tonpegel den eingestellten Schwellwert überschritten hat
Funktionsweise des Sensors
Dieser Sensor besitzt auf seiner Platine zwei funktionelle Bestandteile: Die vordere Sensoreinheit, welche das Umfeld physikalisch misst und als analoges Signal auf die zweite Einheit, den Komparator, ausgibt. Der Komparator vergleicht den Messwert des Sensors mit der am Drehpotentiometer eingestelltem Wert und gibt bei Überschreitung des Wertes am Drehpotentiometer ein logisches High-Signal am digitalen Pin und der LED L1 aus.
Hierbei ist zu beachten: Das Signal ist invertiert. Wird ein hoher Wert gemessen, so resultiert dies in einem niedrigeren Spannungswert am analogen Ausgang.
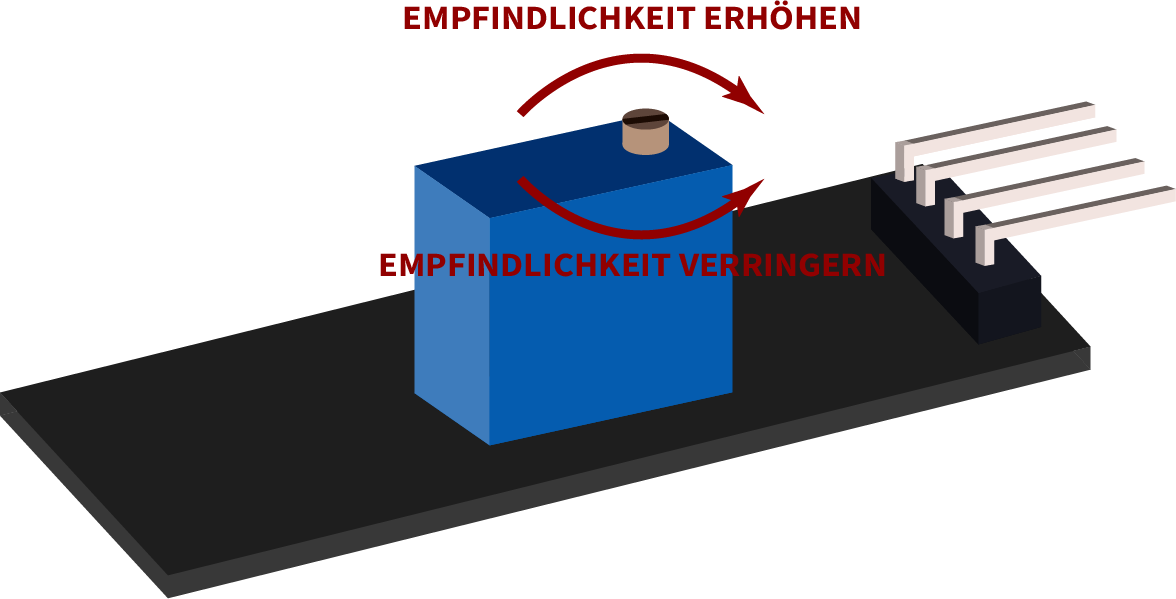
Das Drehpotentiometer kann wie folgt eingestellt werden:
Pin-Belegung


| Arduino | Sensor |
|---|---|
| 5 V | +V |
| GND | GND |
| Pin 3 | Digitales Signal |
| Pin A0 | Analoges Signal |
Code-Beispiel
Das Programm liest den aktuellen Spannungswert aus, der am analogen Ausgang gemessen werden kann, und gibt diesen auf der seriellen Schnittstelle aus. Zudem wird ebenfalls der Zustand des digitalen Pins in der Konsole angegeben. Dieser gibt an, ob der Grenzwert überschritten wurde.
Um das folgende Codebeispiel auf Ihren Arduino zu laden, empfehlen wir die Verwendung der Arduino IDE. In der IDE können Sie den passenden Port und das richtige Board für Ihr Gerät auswählen.
Kopieren Sie den unten stehenden Code in Ihre IDE. Um den Code auf Ihren Arduino hochzuladen, klicken Sie einfach auf den Upload-Button.
// Deklaration und Initialisierung der Eingang-Pins
int analog_input = A0; // Analoger Ausgang des Sensors
int digital_input = 3; // Digitaler Ausgang des Sensors
void setup () {
pinMode(analog_input, INPUT);
pinMode(digital_input, INPUT);
Serial.begin(9600); // Serielle Ausgabe mit 9600 bps
Serial.println("KY-037 Geräuscherkennung");
}
// Das Programm liest die aktuellen Werte der Eingang-Pins
// und gibt diese auf der seriellen Ausgabe aus
void loop () {
float analog_value;
int digital_value;
//Aktuelle Werte werden ausgelesen, auf den Spannungswert konvertiert...
analog_value = analogRead(analog_input) * (5.0 / 1023.0);
digital_value = digitalRead(digital_input);
//... und an dieser Stelle ausgegeben
Serial.print("Analoger Spannungswert: ");
Serial.print(analog_value, 4);
Serial.print(" V, \t Grenzwert: ");
if (digital_value == 1) {
Serial.println("erreicht");
}
else {
Serial.println("noch nicht erreicht");
}
Serial.println("----------------------------------------------------------------");
delay(1000);
}
Der Mikrofon-Soundsensor mit hoher Empfindlichkeit gibt ein Signal aus, wenn das vordere Mikrofon ein Geräusch wahrnimmt. Die Empfindlichkeit des Sensors kann mit einem Regler angepasst werden, sodass er auf unterschiedlich laute Geräusche reagieren kann. Dieser Sensor eignet sich ideal für Projekte, bei denen Geräusche erkannt und darauf reagiert werden sollen, wie z.B. in Sprachsteuerungen, Überwachungssystemen oder interaktiven Installationen. Durch die einstellbare Empfindlichkeit kann der Sensor an verschiedene Umgebungsbedingungen und spezifische Anforderungen angepasst werden.
Benutzungshinweis
Dieser Sensor ist ideal für die Schwellenwertmessung geeignet. Das bedeutet, dass der Sensor ein digitales High-Signal abgibt, sobald ein am Drehpotentiometer vom Anwender eingestellter Schwellenwert überschritten wird. Hierbei ist zu beachten, dass das digitale Signal aus dem Vergleich des Wertes, welche am Drehpotentiometer eingestellt ist und dem gemessenen Wert am Sensor ist, welche dann vom auf dem Board verbauten LM393 Komparator verglichen werden. Dabei ist der eingestellte Wert des Drehpotentiometers der Schwellenwert, welcher dazu dient ein logisches High-Signal zu definieren.
Digitaler Ausgang: Wird ein Magnetfeld erkannt, so wird hier ein Signal ausgegeben
Analoger Ausgang: Direkter Messwert der Sensoreinheit
LED1: Zeigt an, dass der Sensor mit Spannung versorgt ist
LED2: Zeigt an, dass ein Magnetfeld detektiert wurde
Funktionsweise des Sensors
Dieser Sensor besitzt auf seiner Platine zwei funktionelle Bestandteile: Die vordere Sensoreinheit, welche das Umfeld physikalisch misst und als analoges Signal auf die zweite Einheit, den Komparator, ausgibt. Der Komparator vergleicht den Messwert des Sensors mit der am Drehpotentiometer eingestelltem Wert und gibt bei Überschreitung des Wertes am Drehpotentiometer ein logisches High-Signal am digitalen Pin und der LED L1 aus.
Hierbei ist zu beachten: Das Signal ist invertiert. Wird ein hoher Wert gemessen, so resultiert dies in einem niedrigeren Spannungswert am analogen Ausgang.
Das Drehpotentiometer kann wie folgt eingestellt werden:
Pin-Belegung

| Raspberry Pi | Sensor |
|---|---|
| GPIO 24 [Pin 18] | Digitales Signal |
| 3,3 V [Pin 1] | +V |
| GND [Pin 6] | GND |
| - | Analoges Signal |
| Sensor | KY-053 |
|---|---|
| Analoges Signal | A0 |
| Digitales Signal | - |
| +V | - |
| GND | - |
| Raspberry Pi | KY-053 |
|---|---|
| GPIO 3 [Pin 5] | SCL |
| GPIO 2 [Pin 3] | SDA |
| 3,3 V [Pin 1] | VDD |
| GND [Pin 6] | GND |
Analoger Sensor, daher muss folgendes beachtet werden: Der Raspberry Pi besitzt, im Gegensatz zum Arduino, keine analogen Eingänge bzw. es ist kein ADC (analog digital Converter) im Chip des Raspberry Pi's integriert. Dies schränkt den Raspberry Pi ein, insofern man Sensoren einsetzen möchte, bei denen keine digitalen Werte ausgegeben werden, sondern es sich um einen kontinuierlich veränderlichen Wert handelt (Beispiel: Potentiometer -> Andere Position = Anderer Spannungswert).
Um diese Problematik zu umgehen, enthält unser Sensorkit X40 mit dem KY-053 ein Modul mit einem 16-Bit ADC, welchen Sie am Raspberry nutzen können, um diesen um 4 analoge Eingänge zu erweitern. Dieser wird per I2C an den Raspberry Pi angeschlossen, übernimmt die analoge Messung und übergibt den Wert digital an den Raspberry Pi.
Somit empfehlen wir bei analogen Sensoren dieses Sets das KY-053 Modul mit dem erwähnten ADC dazwischenzuschalten. Nähere Informationen finden Sie auf der Informationsseite zum KY-053 Analog Digital Converter KY-053 Analog Digital Converter.
Code-Beispiel
Achtung! Für die Verwendung dieses Moduls, in Kombination mit dem KY-053 Analog-Digital-Converter, ist die Einrichtung einer virtuellen Umgebung nötig. Alle hierfür notwendigen Informationen finden Sie hier.
# -*- coding: iso-8859-1 -*-
import time
import board
import busio
import adafruit_ads1x15.ads1115 as ADS
from adafruit_ads1x15.analog_in import AnalogIn
from gpiozero import DigitalInputDevice
# Erstelle den I2C-Bus
i2c = busio.I2C(board.SCL, board.SDA)
# Erstelle das ADC-Objekt mit dem I2C-Bus
ads = ADS.ADS1115(i2c)
# Erstelle Single-Ended-Eing�nge auf den Kan�len
chan0 = AnalogIn(ads, ADS.P0)
chan1 = AnalogIn(ads, ADS.P1)
chan2 = AnalogIn(ads, ADS.P2)
chan3 = AnalogIn(ads, ADS.P3)
delayTime = 1
# Initialisiere den DigitalInputDevice fuer den Sensor an GPIO 24
digital_pin = DigitalInputDevice(24, pull_up=False) # pull_up=False, da pull_up_down=GPIO.PUD_OFF war
while True:
analog = '%.2f' % chan0.voltage
# Ausgabe auf die Konsole
if not digital_pin.is_active:
print("Analoger Spannungswert:", analog, "V, ", "Grenzwert: noch nicht erreicht")
else:
print("Analoger Spannungswert:", analog, "V, ", "Grenzwert: erreicht")
print("---------------------------------------")
# Reset + Delay
time.sleep(delayTime)
Der Mikrofon-Soundsensor mit hoher Empfindlichkeit gibt ein Signal aus, wenn das vordere Mikrofon ein Geräusch wahrnimmt. Die Empfindlichkeit des Sensors kann mit einem Regler angepasst werden, sodass er auf unterschiedlich laute Geräusche reagieren kann. Dieser Sensor eignet sich ideal für Projekte, bei denen Geräusche erkannt und darauf reagiert werden sollen, wie z.B. in Sprachsteuerungen, Überwachungssystemen oder interaktiven Installationen. Durch die einstellbare Empfindlichkeit kann der Sensor an verschiedene Umgebungsbedingungen und spezifische Anforderungen angepasst werden.
Benutzungshinweis
Dieser Sensor ist ideal für die Schwellenwertmessung geeignet. Das bedeutet, dass der Sensor ein digitales High-Signal abgibt, sobald ein am Drehpotentiometer vom Anwender eingestellter Schwellenwert überschritten wird. Hierbei ist zu beachten, dass das digitale Signal aus dem Vergleich des Wertes, welche am Drehpotentiometer eingestellt ist und dem gemessenen Wert am Sensor ist, welche dann vom auf dem Board verbauten LM393 Komparator verglichen werden. Dabei ist der eingestellte Wert des Drehpotentiometers der Schwellenwert, welcher dazu dient ein logisches High-Signal zu definieren.
Digitaler Ausgang: Liegt der Tonpegel überhalb des eingestellten Schwellwertes, so wird hier ein Signal ausgegeben
Analoger Ausgang: Direkter Messwert der Sensoreinheit
LED1: Zeigt an, dass der Sensor mit Spannung versorgt ist
LED2: Zeigt an, dass der Tonpegel den eingestellten Schwellwert überschritten hat
Funktionsweise des Sensors
Dieser Sensor besitzt auf seiner Platine zwei funktionelle Bestandteile: Die vordere Sensoreinheit, welche das Umfeld physikalisch misst und als analoges Signal auf die zweite Einheit, den Komparator, ausgibt. Der Komparator vergleicht den Messwert des Sensors mit der am Drehpotentiometer eingestelltem Wert und gibt bei Überschreitung des Wertes am Drehpotentiometer ein logisches High-Signal am digitalen Pin und der LED L1 aus.
Hierbei ist zu beachten: Das Signal ist invertiert. Wird ein hoher Wert gemessen, so resultiert dies in einem niedrigeren Spannungswert am analogen Ausgang.
Das Drehpotentiometer kann wie folgt eingestellt werden:
Pin-Belegung

| Micro:Bit | Sensor |
|---|---|
| Pin 1 | Digitales Signal |
| 3,3 V | +V |
| GND | GND |
| - | Analoges Signal |
| Sensor | KY-053 |
|---|---|
| Analoges Signal | A0 |
| Digitales Signal | - |
| +V | - |
| GND | - |
| Micro:Bit | KY-053 |
|---|---|
| Pin 19 | SCL |
| Pin 20 | SDA |
| 3,3 V | VDD |
| GND | GND |
Analoger Sensor, daher muss folgendes beachtet werden: Der Micro:Bit besitzt analoge Eingänge bzw. es ist ein ADC (analog digital Converter) im Chip des Micro:Bits integriert. Diese sind jedoch nur auf 10-Bit beschränkt und bieten daher nur eine recht geringe Genauigkeit für analoge Messungen.
Um diese Problematik zu umgehen, enthält unser Sensorkit X40 mit dem KY-053 ein Modul mit einem 16-Bit ADC, welchen Sie am Micro:Bit nutzen können, um diesen um 4 analoge Eingänge zu erweitern. Dieser wird per I2C an den Micro:Bit angeschlossen, übernimmt die analoge Messung und übergibt den Wert digital an den Micro:Bit.
Somit empfehlen wir bei analogen Sensoren dieses Sets das KY-053 Modul mit dem erwähnten ADC dazwischenzuschalten. Nähere Informationen finden Sie auf der Informationsseite zum KY-053 Analog Digital Converter KY-053 Analog Digital Converter.
Code-Beispiel
Das Programm nutzt zur Ansteuerung des ADS1115 ADC die entsprechende Bibliothek von uns. Diese wurde unter dem folgenden Link pxt-ads1115 unter der MIT-Lizenz veröffentlicht.
pins.setPull(DigitalPin.P1, PinPullMode.PullUp)
ADS1115.setMode(mode.Multi)
ADS1115.setRate(rate.Rate5)
ADS1115.setGain(gain.One)
ADS1115.initADS1115(userInI2C.Gnd)
basic.forever(function () {
serial.writeString("Analog value: ")
serial.writeLine("" + (ADS1115.raw_to_v(ADS1115.read(0))))
if (pins.digitalReadPin(DigitalPin.P1) == 1) {
serial.writeLine("Threshold value reached")
} else {
serial.writeLine("Threshold value not yet reached")
}
serial.writeLine("_____________________________________")
basic.pause(1000)
})
Beispielprogramm Download
Der Mikrofon-Soundsensor mit hoher Empfindlichkeit gibt ein Signal aus, wenn das vordere Mikrofon ein Geräusch wahrnimmt. Die Empfindlichkeit des Sensors kann mit einem Regler angepasst werden, sodass er auf unterschiedlich laute Geräusche reagieren kann. Dieser Sensor eignet sich ideal für Projekte, bei denen Geräusche erkannt und darauf reagiert werden sollen, wie z.B. in Sprachsteuerungen, Überwachungssystemen oder interaktiven Installationen. Durch die einstellbare Empfindlichkeit kann der Sensor an verschiedene Umgebungsbedingungen und spezifische Anforderungen angepasst werden.
Benutzungshinweis
Dieser Sensor ist ideal für die Schwellenwertmessung geeignet. Das bedeutet, dass der Sensor ein digitales High-Signal abgibt, sobald ein am Drehpotentiometer vom Anwender eingestellter Schwellenwert überschritten wird. Hierbei ist zu beachten, dass das digitale Signal aus dem Vergleich des Wertes, welche am Drehpotentiometer eingestellt ist und dem gemessenen Wert am Sensor ist, welche dann vom auf dem Board verbauten LM393 Komparator verglichen werden. Dabei ist der eingestellte Wert des Drehpotentiometers der Schwellenwert, welcher dazu dient ein logisches High-Signal zu definieren.
Digitaler Ausgang: Liegt der Tonpegel überhalb des eingestellten Schwellwertes, so wird hier ein Signal ausgegeben
Analoger Ausgang: Direkter Messwert der Sensoreinheit
LED1: Zeigt an, dass der Sensor mit Spannung versorgt ist
LED2: Zeigt an, dass der Tonpegel den eingestellten Schwellwert überschritten hat
Funktionsweise des Sensors
Dieser Sensor besitzt auf seiner Platine zwei funktionelle Bestandteile: Die vordere Sensoreinheit, welche das Umfeld physikalisch misst und als analoges Signal auf die zweite Einheit, den Komparator, ausgibt. Der Komparator vergleicht den Messwert des Sensors mit der am Drehpotentiometer eingestelltem Wert und gibt bei Überschreitung des Wertes am Drehpotentiometer ein logisches High-Signal am digitalen Pin und der LED L1 aus.
Hierbei ist zu beachten: Das Signal ist invertiert. Wird ein hoher Wert gemessen, so resultiert dies in einem niedrigeren Spannungswert am analogen Ausgang.
Das Drehpotentiometer kann wie folgt eingestellt werden:
Pin-Belegung

| Raspberry Pi Pico | Sensor |
|---|---|
| GPIO26 (A0) | Analoges Signal |
| GND | GND |
| 3 V | +V |
| GPIO18 | Digitales Signal |
Man kann auch einen ADC wie der KY-053 verwenden. Dieser ADC hat eine höhere Auflösung als der interne ADC vom Raspberry Pi Pico, was dazuführt, dass der Sensor genauer ausgewertet werden kann.
Code-Beispiel
Das Programm liest den aktuellen Spannungswert aus, der durch das Auslesen des analogen Ausgangs berechnet werden kann, und gibt diesen auf der seriellen Schnittstelle aus. Zudem wird ebenfalls der Zustand des digitalen Pins in der Konsole angegeben. Dieser gibt an, ob der Grenzwert überschritten wurde.
Um das folgende Codebeispiel auf Ihren Pico zu laden, empfehlen wir die Verwendung von der Thonny IDE. Sie müssen nur zunächst unter Run > Configure interpreter … > Interpreter > Which kind of interpreter should Thonny use for running your code? > MicroPython (Raspberry Pi Pico) auswählen.
Kopieren Sie den untenstehenden Code nun in Ihre IDE und klicken Sie auf Run.
# Bibliotheken laden
from machine import Pin, ADC
from time import sleep
# Initialisierung von ADC0
adc = ADC(0)
# Initialisierung von GPIO18 als Input
digital = Pin(18,Pin.IN, Pin.PULL_UP)
print("KY-037 Mikrofontest")
# Endlosschleife zum Auslesen des ADC
while True:
raw_value = adc.read_u16()
# Umrechnung von Analogwert zu Spannung
Volt = round(raw_value* 3.3 / 65536, 2)
digital_value = digital.value()
# Serielle Ausgabe des Analogwertes und der errechneten Spannung
print("Analoger Spannungswert: " + str(Volt) + " V\t Grenzwert: ", end="")
# Abfrage ob der Digitale Wert sich geändert hat mit Serieller Ausgabe
if digital_value == 1:
print("erreicht")
else:
print("nicht erreicht")
print("----------------------------------------")
sleep(2)